
|
Les cas solides :Lac Chauvet, France, 1952VI - Lanalyse des photos par Laurent Guérin |
Létude ci-dessous est due à Laurent Guérin, le fils de Pierre Guérin. Ingénieur lui-même, il avait notablement collaboré à larticle de son père sur Chauvet (la version originale publiée dans le JSE le crédite même explicitement pour son aide), en particulier pour tous les calculs trigonométriques.
Lorsque je lai retrouvé puis contacté, il a très vite accepté de reprendre le collier, et sest même je crois piqué au jeu lorsque je lui ai soumis lanomalie du nuage. Il a repris tous les calculs en affinant énormément la méthode, afin de tirer davantage dinformations des photos, et de tenir compte des moindres facteurs pouvant influer sur les calculs.
Je le remercie chaleureusement ici pour son implication et ses talents en géométrie.
Lanomalie du nuage vient du fait que lextrémité gauche du nuage en bas de la photo 3 semblerait, à première vue, devoir être légèrement visible sur la droite de la photo 4. Daprès les calculs de Pierre Guérin, Frégnale a en effet pivoté sur la gauche denviron 23°, soit sensiblement moins que le champ angulaire couvert par un film 35mm (environ 30°). Voir le chapitre V du dossier Chauvet.
Bien entendu, les calculs initiaux de Pierre Guérin comportaient des marges derreur non négligeables qui, cumulées, pourraient expliquer cet écart apparent dun peu plus de 6°. Mais pour sen assurer, il fallait recommencer tous les calculs depuis le début.
Laurent Guérin a donc patiemment réalisé toutes ces mesures et tous ces calculs. Cest avec lui que cette page a été réalisée. Pour les matheux passionnés, toute la théorie et les équations se trouvent ici.
les grands axes ai et petits axes bi des images de lobjet, dont la distorsion est corrigeable en fonction de la distance mesurable au centre de la photo ;
les angles γi entre la trajectoire supposée de lobjet et la ligne dhorizon (photos 3 et 4 uniquement) ;
les angles ωi entre le grand axe de limage de lobjet et la ligne dhorizon (photos 3 et 4 uniquement) ;
les angles γiωi entre la trajectoire supposée de lobjet et le grand axe de limage de lobjet (ωi est compté ici algébriquement contrairement aux formules originales) ;
les angles γi et ωi sur les photos 1 et 2 sont arbitrairement estimés de sorte que les valeurs γiωi soient compatibles avec leurs mesures.
On trouvera la démonstration des formules, plus complète que celle donnée dans larticle original, ici.
Laplatissement ri est donné par bi/ai.
(1) sin αi/ai = cste ;
(2) cos βi = tg αi/tg α0 ;
(3) tg γi = sin αi.tg βi (βi est compté ici négativement à gauche de lobservateur contrairement aux formules originales) ;
(4) tg αi = ri.(1ri2)½.sin γi/sin(γiωi) ;
(5) (1ri2)½.sin ωi = sin Ωi.sin βi (Ωi est compté positivement quand lobjet sincline de manière à paraître plus circulaire à lobservateur, comme dans les formules originales) ;
Une autre formule importante nétait pas explicitée dans larticle original :
(6) ri = sin αi.cos Ωi+cos αi.sin Ωi.cos βi.
On part des mesures les plus fiables (photo 3) r3, γ3 et ω3 pour en déduire selon (4) α3.
Une valeur de α4 est obtenue selon le même principe, car les valeurs ont une fiabilité correcte.
La formule (1) permet den déduire les autres αi ; on constate une excellente concordance entre les deux valeurs obtenues de α4 ; on constate aussi que les valeurs de αi pour les photos 1 et 2 sont cohérentes avec celles obtenues selon (4) avec les estimations arbitraires de γi et de ωi.
Comme il est estimé que β2 est voisin de zéro, une estimation de Ω2 est donnée à laide de α2 et r2. Cela correspond en fait à utiliser (6) qui devient ici r2 = sin(α2+Ω2).
Le calcul plus précis de β2 est alors obtenu grâce à (5) ; (2) conduit alors à α0.
Cette même formule (2) conduit alors aux autres βi, puis les autres Ωi sont alors déduits de (5).
La cohérence des valeurs obtenues (utilisation dun α moyen entre les photos 1 et 2) est vérifiée pour comparer lécart angulaire calculé entre ces deux photos et la mesure de cet écart sur une photo composite.
En effet, à partir des mesures des positions dun certain nombre de points caractéristiques de larbre (visibles sur les photos 1 et 2), il est possible de calculer la transformation permettant de passer dun repère lié à la photo 1 à un repère lié à la photo 2.
A partir des mesures de lobjet sur la photo 1, il est possible de calculer la direction de lobjet dans le repère de la photo 1, puis par la transformation ci-dessus, de calculer cette direction dans le repère de la photo 2 (qui représente la position quaurait eue lobjet sur la photo 2 sil navait pas bougé). De même, à partir des mesures de lobjet sur la photo 2, il est possible de calculer la direction de lobjet dans le repère de la photo 2. Lécart angulaire entre les deux positions est obtenu par le produit scalaire entre les deux directions calculées dans le repère de la photo 2.
Deux jeux de test sur des points caractéristiques différents conduisent à des valeurs extrêmement voisines, prouvant la fiabilité et la précision de ce calcul et donc de lécart calculé. On trouve χ = 13.75° ±0.05°.
Comme expliqué dans lannexe (ici), la transformation est caractérisée par trois paramètres λ, η et ω, qui doivent être déterminés de manière à optimiser lajustement des points caractéristiques de la photo 1 sur la photo 2. (Cet ω na rien à voir avec langle entre le grand axe de limage de lobjet et la ligne dhorizon sur les photos.)
Le formulaire ci-dessous permet de calculer, pour chacun des paramètres, la meilleure valeur x autour dune valeur approximative initiale x0, parmi les valeur xn = x0+n.δx, avec 10 ≤ n ≤ 10. Ce processus peut être répété plusieurs fois en prenant la valeur obtenue à une étape comme valeur initiale de létape suivante et en diminuant lincrément, de manière à affiner le résultat.
On entre les mesures des points caractéristiques d1i et d2i, φ1i et φ2i, les valeurs θ1i et θ2i seront automatiquement calculées.
On entre les mesures de lobjet d1 et d2, φ1 et φ2, les valeurs θ1 et θ2 seront automatiquement calculées.
On entre une valeur approximative pour λ, η et ω, et des incréments de test pour ces paramètres. Une méthode graphique dévaluation des valeurs initiales est expliquée plus bas.
Le bouton lance alors loptimisation, et lécart angulaire χ est automatiquement calculé. Il est possible daffiner le résultat à partir des valeurs ainsi trouvées en diminuant les incréments de test (attention à bien mettre des points et non des virgules aux nombres décimaux).
 |
A laide dun logiciel graphique, on calibre par étirement, translation et rotation les photos 1 et 2 de sorte quelles aient pour dimension 240x360. (Les fichiers au format jpeg obtenus par copie décran qui servent à illustrer cette page ne sont pas aussi précis que ce que permet dobtenir le logiciel, qui permet de calculer les longueurs et les angles des objets quon manipule.) Les traits rouges délimitent le rectangle, les traits bleus donnent le centre.
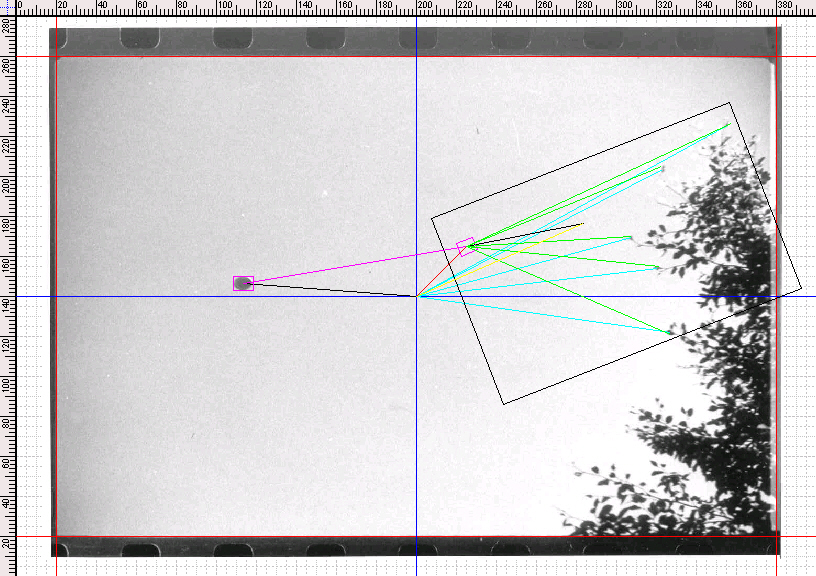
On prend cinq feuilles de larbre sur la photo 1 (et visibles sur la photo 2), que lon relie au centre de lobjet (traits verts), et au centre de la photo (traits cyans). La mesure des traits cyans permet dobtenir les paramètres d1i et φ1i. Le centre de lobjet est relié au centre de la photo (trait noir). La mesure du trait noir permet dobtenir les paramètres d1 et φ1. Lensemble de ces éléments est englobé dans un rectangle (à lexception des traits cyans) destiné à être reporté puis ajusté sur la photo 2. Voir le résultat ci-contre à gauche (cliquez pour agrandir). |
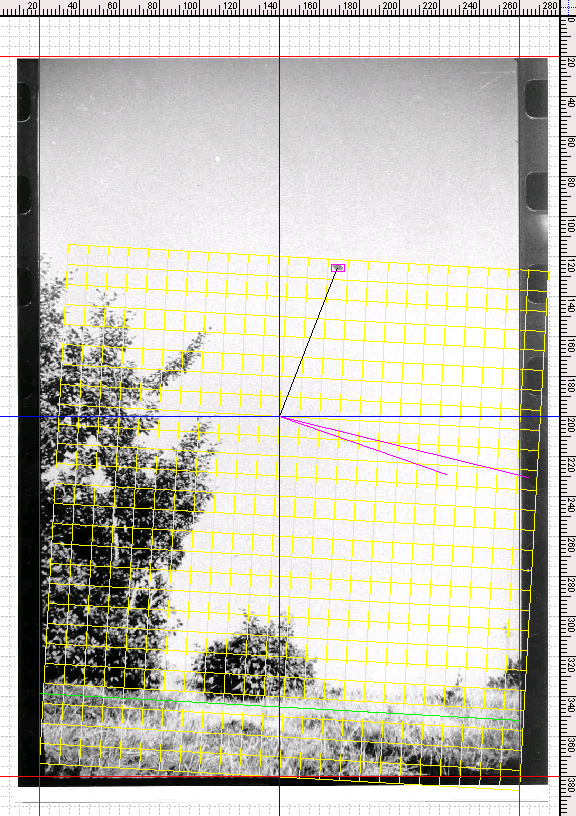
| On ajuste alors ce rectangle et son contenu sur la photo 2 de sorte que les extrémités des traits verts coïncident au mieux avec les mêmes feuilles. On relié à nouveau les cinq feuilles au centre de la photo (traits cyans). La mesure de ces nouveaux traits cyans permet dobtenir les paramètres d2i et φ2i. Le centre de lobjet est relié au centre de la photo (trait noir). La mesure du nouveau trait noir permet dobtenir les paramètres d2 et φ2. On a en outre relié le centre de la photo à la position reportée du centre de la photo 1 (trait jaune), le centre de lobjet à la position reportée du centre de lobjet sur la photo 1 (trait magenta) et enfin le centre de la photo à cette position reportée du centre de lobjet sur la photo 1 (trait rouge).
Cela donne la photo 2 composite ci-dessous (cliquez pour agrandir). |
On reprend alors ce rectangle et son contenu (à lexception des nouveaux traits cyans) ainsi que les nouveaux traits, et on reporte le tout sur la photo 1 de sorte à faire coïncider les deux rectangles.
Cela donne la photo 1 composite ci-dessous.(Cliquez pour agrandir). Ces photos composites permettent destimer les paramètres de la transformation passant du repère de la photo 1 à celui de la photo 2. La mesure de la longueur l du trait jaune (= 9,10 mm) permet dobtenir une première estimation de λ par tg λ = l/f. On trouve λ = 11,4° environ. Lorientation de ce trait jaune sur la photo 1 composite permet dobtenir une première estimation de η. On trouve η = 177,6° environ. Langle que fait le rectangle sur la photo 2 composite permet dobtenir une première estimation de ω. On trouve ω = 21,2° environ. |
 |
 |
Ce sont ces valeurs, assez précises pour les positions des feuilles et de lobjet sur chaque photo, mais sans doute approximatives pour les paramètres de la transformation, qui sont initialisées dans le formulaire plus haut.
Les valeurs des paramètres de la transformation sont a priori approximatives non seulement parce que la procédure dajustement est manuelle au sein dun logiciel de dessin, mais aussi parce que les éléments que lon déplace dune photo à lautre devraient eux-mêmes être distordus lors du déplacement puisque les centres ne coïncident pas, ce qui nest pas réalisé dans le processus décrit ci-dessus. Doù la nécessité de procéder à une optimisation mathématiquement rigoureuse implémentée dans le précédent formulaire.
Une première passe avec un incrément de 0,5° conduit à λ = 10,9°, η = 180,1° et ω = 22,7°. En diminuant lincrément à 0,1°, on obtient alors λ = 11,0°, η = 179,7° et ω = 22,9°. En diminuant lincrément à 0,01°, on obtient finalement, après une deuxième passe de contrôle, λ = 10,98°, η = 179,81° et ω = 22,88°, et enfin χ = 13,77°.
Il est intéressant de constater cependant que lon peut tout de même, par ces manipulations graphiques, obtenir une estimation directe de lécart angulaire entre les deux positions de lobjet. En effet, sur la photo 1 composite, on constate que le vecteur déplacement est quasiment radial. En mesurant la longueur d du trait magenta (= 11,31 mm), on peut considérer que tg(θ1+χ) = (d1+d)/f, ce qui donne lestimation χ = 13,5° environ, valeur extrêmement voisine de celle donnée par le calcul théorique précis avec distorsions.
Le constat plus haut est mis à profit pour dériver de manière différente les paramètres angulaires. En effet, Les premières étapes de cette méthode modifiée sont identiques : α3 et α4 sont toujours déterminées grâce à (4), tandis que α1 et α2 sont déterminées daprès α3 grâce à (1).
Pour les photos 1 et 2, αi est donc fonction de ai, a3 et α3. Comme expliqué dans lannexe (ici), il se trouve que α0 est fonction de α1, α2 et de lécart angulaire χ entre les positions 1 et 2. Donc α0 est entièrement déterminé par a1, a2, a3, α3 et χ.
La formule (2) permet alors de déterminer les βi, puis (3) permet de déterminer les γi, puis (4) permet de déterminer les ωi, et enfin (5) permet de déterminer les Ωi.
En effet, comme expliqué en annexe (ici), premièrement, connaissant la hauteur angulaire et lazimut dun point sur une photo et la position de ce point par rapport au centre de cette photo, il est possible de calculer la hauteur angulaire et lazimut de laxe de visée de cette photo ; deuxièmement, connaissant la hauteur angulaire et lazimut de laxe de visée dune photo et la position dun point par rapport au centre de cette photo, il est possible de calculer la hauteur angulaire et lazimut de ce point ; et enfin troisièmement, connaissant la hauteur angulaire et lazimut dun point et la hauteur angulaire et lazimut de laxe de visée dune photo, il est possible de calculer la position quaurait ce point sur cette photo.
Connaissant la hauteur angulaire et lazimut de lobjet sur la photo 3, on mesure donc sa position pour en déduire la hauteur angulaire et lazimut de laxe de visée de cette photo, puis on mesure la position du nuage sur cette photo pour en déduire sa hauteur angulaire et son azimut.
Connaissant la hauteur angulaire et lazimut de lobjet sur la photo 4, on mesure ensuite sa position pour en déduire la hauteur angulaire et lazimut de laxe de visée de cette photo, ce qui permet enfin de calculer la position du nuage sur cette photo, puisquon connaît sa hauteur angulaire et son azimut.
Connaissant la hauteur angulaire de laxe de visée dune photo, on en déduit la position de lhorizon sur cette photo, puisquon connaît sa hauteur angulaire, qui est nulle.
Les mesures des positions sont effectuées dans un repère centré sur laxe de visée et orienté selon les hauteurs angulaires et les azimuts, directions estimées daprès le nuage sur la photo 3 et daprès le talus sur la photo 4.
Le formulaire ci-dessous permet de réaliser tous les calculs ci-dessus (attention à bien mettre des points et non des virgules aux nombres décimaux).
On constate queffectivement le nuage devrait être visible sur la photo 4 (xN4 = 8,50mm) avec les valeurs calculées daprès les mesures de larticle original.
Cependant, on constate quen faisant varier dans les intervalles définis par les incertitudes mentionnées dans larticle original les grand et petit axes, ou les angles de la trajectoire et du grand axe par rapport à lhorizon pour les photos 3 et 4, on obtient alors des variations conséquentes pour les différents paramètres, et en particulier pour labscisse du nuage sur la photo 4. On peut donc dire que cette méthode de calcul est très sensible aux incertitudes.
| 2a'1 = 0,845±0,030 | 2a'2 = 0,873±0,025 | 2a'3 = 0,751±0,015 | 2a'4 = 0,544±0,015 |
| 2b'1 = 0,720±0,015 | 2b'2 = 0,702±0,015 | 2b'3 = 0,528±0,015 | 2b'4 = 0,286±0,015 |
| γ3 = 26,0°±1,5° | γ4 = 41,0°±3,0° | ||
| ω3 = 4,0°±0,5° | ω4 = 9,0°±1,0° | ||
| γ1ω1 = 16,0°±2,0° | γ2ω2 = 4,0°±0,5° |
Prenons par exemple les valeurs brutes extrêmes suivantes :
| 2a'1 = 0,815 | 2a'2 = 0,848 | 2a'3 = 0,766 | 2a'4 = 0,559 |
| 2b'1 = 0,705 | 2b'2 = 0,717 | 2b'3 = 0,543 | 2b'4 = 0,301 |
| γ3 = 24,5° | γ4 = 38,0° | ||
| ω3 = 4,5° | ω4 = 10,0° |
On constate cette fois-ci que le nuage est bien invisible sur la photo 4 (xN4 = 12,63mm). Lhorizon quant à lui nest pas modifié et est bien sous le talus (yH4 = 14,49mm). Mais il peut y avoir dautres choix permettant ce résultat. Sur les photos 3 et 4 ci-dessous (cliquez pour agrandir), les traits jaunes représentent le système de coordonnées redressé, les traits magenta indiquent la position du nuage et le trait vert celle de lhorizon. Sur la photo 4, les positions du nuage avec les valeurs originales de larticle (anomalie) et le nouveau jeu de test sont représentées.
 |
 |
Nous venons de voir comment expliquer le fait que le nuage ne soit pas visible sur la photo 4 : sa position calculée est extrêmement sensible aux choix des mesures dans leur intervalle dincertitude. Mais le test ci-dessus nétait quun exemple ; encore faut-il aussi que tous les autres paramètres recalculés après coup soient eux aussi cohérents avec leurs mesures (en particulier les angles γ et ω).
Ce dernier point mérite dêtre commenté : en effet, le formulaire ci-dessus donne pour ces deux angles des valeurs recalculées différentes des valeurs initiales mesurées. Ceci vient du fait que le système déquations est surdéterminant si lon considère r, γ et ω comme des paramètres et α et β comme des inconnues. Plus précisément, on a dans ce cas 17 paramètres (les ai, ri, γi et ωi ainsi que χ) et 13 inconnues (les αi, βi et Ωi ainsi que α0), tandis quon a 20 équations (3 de type (1)*, 4 de type (2), (3), (4), (5) ou (6)**, ainsi que la relation reliant χ à α1, α2, β1 et β2).
Il est donc patent que les mesures des paramètres ne peuvent être considérées comme indépendantes et que toutes les équations ne peuvent être vérifiées simultanément avec des choix de valeurs mesurées quelconques.
* sin αp/ap = sin αq/aq conduit bien à trois équations indépendantes en faisant varier p et q.
** Les équations (4), (5) et (6) ne sont en effet pas indépendantes.
Si les conditions des mesures étaient telles quelles conduisaient à des incertitudes minimes sur tous les paramètres, alors cela invaliderait le modèle mathématique. Or il se trouve que les mesures, en particulier celles de γ et ω sont entachées de larges incertitudes. Il convient donc de les utiliser a minima dans la dérivation des paramètres et de favoriser les autres mesures, comme celles de a et r, et surtout χ. Cest ce que nous avons fait dans le formulaire, où γ3 et ω3 sont utilisés une seule fois au départ pour calculer α3, puis recalculés à la fin une fois tous les autres paramètres déterminés.
Si lon considère maintenant les γi et ωi comme des inconnues et si lon rajoute un paramètre a0 (en relation directe avec la largeur angulaire maximale), il se rajoute une quatrième équation de type (1), et lon obtient un système de 21 équations à 21 inconnues et 10 paramètres. Le choix de ce qui joue le rôle de paramètre et celui dinconnue est dailleurs totalement arbitraire : on peut soit tenter de résoudre les équations en fonction des données mesurées (méthode directe), ou bien attribuer des valeurs test à des inconnues et calculer quelles devraient alors être les valeurs mesurées, et les comparer aux mesures effectives, ou bien même une méthode mixte.
Il savère que cette dernière méthode est la plus efficace et facile à mettre en uvre : nous posons comme valeurs test les azimuts βi et les aplatissements ri, ainsi que la largeur angulaire maximale 2ε0, ce qui permet de calculer tous les autres paramètres angulaires ou dimensionnels. Le choix des βi comme valeurs de test vient de ce que cela conduit à une moindre sensibilité aux variations.
La procédure est la suivante : (2) fournit αi en fonction de α0 et βi ; χ étant fonction de α1, α2, βi et β2, χ est fonction de α0, β1 et β2 ; par inversion, α0 est fonction de χ, β1 et β2, et donc αi est fonction de χ et des βk. (3) fournit γi en fonction de χ et des βk. Linversion de (6) fournit Ωi en fonction de χ, ri et des βk. (5) fournit ωi en fonction de χ, ri et des βk.
On peut contrôler que (4) est bien vérifiée, preuve que les équations étaient dépendantes et quon ne pouvait pas attribuer des valeurs mesurées quelconques à la fois à r, γi et ωi. Le paramètre ε0 permet enfin avec (1) de trouver ai en fonction de ε0, χ et des βk (et bien sûr de la distance focale f), puis de trouver bi en fonction de ε0, χ et des βk.
La simple donnée de valeurs test pour les βi permet donc de déduire les αi et les γi ; la donnée de valeurs mesurées et corrigées pour les ri permet de déduire les Ωi et les ωi ; la donnée dune valeur test pour ε0 permet de déduire les ai et les bi. Le jeu de test permet aussi de calculer la position du nuage et de lhorizon sur la photo 4 et donc de le valider ou non. Il faut ensuite que les valeurs trouvées pour γω soient compatibles avec celles mesurées sur les photos 3 et 4 où la mesure est fiable, et que les valeurs a et b soient cohérentes avec celles mesurées après correction de distorsion.
![]()
En cours de rédaction